产品中心
Product Center

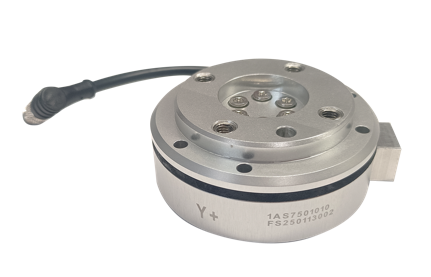
六维力传感器


产品特点/Product features
本六维力传感器用于人形机器人关节处手腕、脚踝关节处,工业机器人臂末端,产品具有高精度、高刚性、抗冲击、抗干扰、高通速性、响应速度快。
1)高精度:原理上采用高精度金属箔式应变计,维间串扰采用结构解耦和算法解耦相结合的技术,大大提高解耦精度和解耦效率;
2)高稳定性:应变电路采用全桥自补偿电路,全温段温度补偿,弹性本体采用航空铝材和高强度不锈钢,保证耐候性和长期工作稳定性;
3)高抗速通性:多通道高速采集信号处理,多种高速通讯协议,提升机器人动作响应频率。
产品参数/Product parameters
输出信号:RS485、CAN、 Ethercat
量 程:Fxyz=0~5000N/Mxyz=0~200N.m(可定制)
综合精度:±1%
工作电压:12~24VDC
工作温度:-20℃~+85℃
响应时间:1ms
安全超载:300%F.S
注:以上参数仅供参考,详细参数请咨询公司技术团队,并根据实际应用见公司提供的技术规格承认书!